
GTJZ1012 Scissor Aerial Operation Platform





I. Агляд прадукту і асаблівасці
Новая пад'ёмная платформа, распрацаваная XCMG, мае рабочую вышыню 12 м, шырыню транспартнага сродку 1,17 м, намінальную нагрузку 320 кг, макс.даўжыня платформы пры 3,2 м і макс.пераадольнасць на 25%.Гэты транспартны сродак мае кампактную канструкцыю, павышаныя характарыстыкі, завершаныя прылады бяспекі, спецыяльна прыдатныя для будаўніцтва.У дадатак.Ён не мае ніякіх забруджванняў, з устойлівым уздымам / апусканнем, простым кіраваннем і абслугоўваннем.Такім чынам, такія платформы шырока прымяняюцца на складах, заводах, аэрапортах і вакзалах, асабліва на вузкіх працоўных пляцоўках.
[Перавагі і магчымасці]
● Эфектыўная і энергазберагальная сістэма электрычнага прывада мае нулявы ўзровень выкідаў і нізкі ўзровень шуму разам з бясследнымі шынамі, што дазваляе гэтай машыне лёгка працаваць у закрытых памяшканнях, такіх як офісныя будынкі, бальніцы і школы, і зводзіць да мінімуму ўздзеянне на навакольнае асяроддзе.
●Актыўны ахоўны механізм, напрыклад, механізм абароны ад выбоін і ўласна распрацаваная сістэма кіравання бяспекай, адрозніваецца гуманізаваным дызайнам і багатымі опцыямі, якія задавальняюць патрэбу кліента ў бяспецы, надзейнасці і інтэлекту.
●Рабочая платформа можа выцягвацца, павялічваючы працоўную прастору, разам са складаным плотам палягчае транспарціроўку.
● «Нулявы радыус павароту» з'яўляецца унікальным і дазваляе машыне ехаць у кут у вузкім пакоі.
●Макс.грузападымальнасць 320 кг, лідзіруючы ў галіны.
●Максімальная хуткасць руху 3,2 км/г і здольнасць да ўздыму 25% палягчаюць кіраванне.
I. Агляд прадукту і асаблівасці
Нажнічная рабочая платформа XCMG GTJZ1012 мае шмат пераваг, як паказана ніжэй:
1. Зручная транспарціроўка і стабільная праца
Тэлескапічная субплатформа забяспечвае вялікую працоўную прастору і працуе са складанай платформай для палягчэння транспарціроўкі і перамяшчэння.Вядучая ў галіны аўтаматычная сістэма абароны ад ямы і пашыраная канструкцыя пратэктара колаў дазваляюць свабодна працаваць нават на няроўнай зямлі.
2. Мінусы аховы навакольнага асяроддзя і зручнае абслугоўванне
Чысты электрычны прывад, нулявы выпуск, нізкі ўзровень шуму і больш экалагічная канструкцыя.Габарытны паддон паваротнага тыпу зручны для абслугоўвання і абслугоўвання.
3. Агульная і модульная канструкцыя
Модульная канструкцыя машыны гарантуе ўніверсальнасць дэталяў, палягчае рамонт і тэхнічнае абслугоўванне кліентаў і забяспечвае больш канкурэнтаздольны кошт.
II.Увядзенне асноўных частак
1. Шасі
Асноўная камплектацыя: рулявое кіраванне двума коламі, прывад 4×2, аўтаматычная тармазная сістэма, аўтаматычная сістэма абароны ад выбоін, шыны з суцэльнай гумы без слядоў, ручная адпусканне тармазоў.
(1) Максімальная хуткасць руху складае 3,2 км/г.
(2) Максімальны градыент складае 25%.
(3) Стандартнае адтуліну ў задняй частцы шасі для транспарціроўкі відэльцаў
(3) Аўтаматычная сістэма абароны ямы - забяспечвае бяспеку ўздыму платформы.
(4) Шыны з цвёрдай гумы без рэйкі - высокая карысная нагрузка, стабільная праца і экалагічна чыстыя
(5) Прывад 4×2, паваротныя колы таксама з'яўляюцца вядучымі, тры хуткасці прывада, што забяспечвае поўны ход.
(6) Аўтаматычная тармазная сістэма - машына тармозіць аўтаматычна, калі яна спыняецца або спыняецца на схіле;акрамя таго, ёсць дадатковы ручной тормаз для экстранай сітуацыі.
2. Бум
(1) Падвойныя цыліндры з пярэдняй стрелой + пяць камплектаў стрэлы зруху.
(2) Высокатрывалая сталь - стрэла малая і бяспечнейшая.
(3) Адпаведнасць трываласці і калянасці - гарантуйце надзейную стралу.
(4) Інспекцыйная рамка - захавайце бяспеку агляду
3. Працоўная пляцоўка
(1) Карысная нагрузка да 320 кг для асноўнай платформы і 115 кг для другаснай платформы;
(2) Даўжыня × шырыня працоўнай платформы: 2,27 м × 1,12 м;
(3) Суб-платформа можа падаўжацца ў адзін бок на 0,9 м;
(4) Вароты платформы самазамыкаюцца
(5) Ахоўнік платформы складаны
4. Гідраўлічная сістэма
(1) Гідраўлічныя элементы - гідраўлічны помпа, галоўны клапан, гідраўлічны рухавік і тормаз ад айчынных (або міжнародных) вядомых вытворцаў
(2) Гідраўлічная сістэма прыводзіцца ў рух з дапамогай шестеренчатого помпы з прывадам ад рухавіка, каб падымаць або апускаць платформу, а таксама кіраваць і кіраваць платформай.
(3) Пад'ёмны цыліндр абсталяваны клапанам аварыйнага апускання - гэта гарантуе, што платформа можа апускацца да ўцягвання з пастаяннай хуткасцю нават у выпадку аварыі або адключэння электрычнасці.
(4) Пад'ёмны цыліндр абсталяваны гідраўлічным замкам для забеспячэння надзейнага ўтрымання вышыні рабочай платформы пасля разрыву гідраўлічнага шланга.
5. Электрычная сістэма
(1) Электрычная сістэма выкарыстоўвае тэхналогію кіравання шынай CAN.Шасі абсталявана кантролерам, платформа абсталявана ручкай кіравання, а сувязь паміж шасі і кантролерам платформы ажыццяўляецца праз шыну CAN, каб кіраваць дзеяннем машыны.
(2) Тэхналогіі прапарцыйнага кіравання робяць кожнае дзеянне стабільным.
(3) Электрычная сістэма кіруе ўсімі дзеяннямі, уключаючы рулявое кіраванне налева/направа, рух наперад/назад, пераключэнне паміж высокай і нізкай хуткасцямі і ўздым/апусканне рабочай платформы.
(4) Некалькі метадаў бяспекі і папярэджання: абарона ад нахілу;ўзаемазамыканне ручак;аўтаматычная ямачная абарона;аўтаматычная ціхаходная абарона на вялікай вышыні;падзенне паўзы на тры секунды;сістэма папярэджання вялікай нагрузкі (опцыя);ахоўная сістэма зарадкі;аварыйная кнопка;гукавы сігнал дзеяння, частата мігалка, гудок, таймер і сістэма дыягностыкі няспраўнасцяў.
III.Канфігурацыя асноўных элементаў
| S/N | Ключавы кампанент | Колькасць | Марка | Нататка |
| 1 | Кантралёр | 1 | Гіршман / Паўночная Даліна | |
| 2 | Галоўны помпа | 1 | Сант/Бухер | |
| 3 | Гідраўлічны рухавік | 2 | Danfoss | |
| 4 | Гідраўлічны тормаз | 2 | Danfoss | |
| 5 | Блок харчавання | 1 | Бухер / GERI | |
| 6 | Вызвальны цыліндр | 1 | Гідраўлічны аддзел XCMG / Дачэн / Шэнбанг / Дяоцзян | |
| 7 | Рулявы цыліндр | 1 | ||
| 8 | акумулятар | 4 | Траян / Ляўка | |
| 9 | Зарадная прылада | 1 | ГПД | |
| 10 | Канцавы выключальнік | 2 | Honeywell/CNTD | |
| 11 | Тэставанне пераключальніка | 2 | Honeywell/CNTD | |
| 12 | Маторны прывад | 1 | Керціс | |
| 13 | Шыны | 4 | Exmile/Topower | |
| 14 | Датчык кута | 1 | Honeywell | Дадаткова |
| 15 | Датчык ціску | 1 | Danfoss | Дадаткова |
IV.Табліца асноўных тэхнічных параметраў
| Пункт | Адзінка | Параметр | Дапушчальны допуск | |
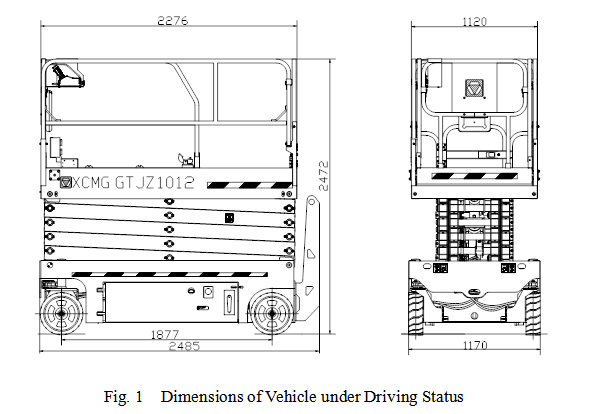
| Памер машыны | Даўжыня (без лесвіцы) | mm | 2485 (2285) | ±0,5 % |
| Шырыня | mm | 1170 | ||
| Вышыня (платформа складзеная) | mm | 2472 (1908) | ||
| Колавая база | mm | 1876 год | ±0,5 % | |
| Колавая каляіна | mm | 1043 | ±0,5 % | |
| Мінімальны дарожны прасвет (пратэктар ямы пры ўздыме/апусканні) | mm | 100/20 | ±5% | |
| Памер працоўнай платформы | Даўжыня | mm | 2276 | ±0,5 % |
| Шырыня | mm | 1120 | ||
| Вышыня | mm | 1254 | ||
| Даўжыня падаўжэння дапаможнай платформы | mm | 900 | ||
| Цэнтраід станка | Гарызантальнае адлегласць да пярэдняга вала | mm | 950 | ±0,5 % |
| Вышыня цэнтру | mm | 663 | ||
| Агульная маса машыны | kg | 2940 | ±3% | |
| Макс.вышыня платформы | m | 10 | ±1% | |
| Мін.вышыня платформы | m | 1.34 | ±1% | |
| Максімальная працоўная вышыня | m | 12 | ±1% | |
| Мінімальны радыус павароту (унутранае/вонкавае кола) | m | 0/2,3 | ±1% | |
| Намінальная нагрузка на рабочую платформу | kg | 320 | — | |
| Карысная нагрузка пасля рабочай платформы пашырана | kg | 115 | — | |
| Час ўздыму працоўнай платформы | s | 50-75 | — | |
| Час апускання працоўнай платформы | s | 43-65 | — | |
| Макс.хуткасць бегу ў нізкім становішчы. | км/г | ≥3,2 | — | |
| Макс.хуткасць руху на вялікай вышыні | км/г | ≥0,8 | — | |
| Максімальны ўздым | % | 25 | — | |
| Вугал папярэджання аб нахіле (убок/наперад і назад) | ° | 1,5/3 | ||
| Пад'ёмны / хадавы рухавік | мадэль | — | — | — |
| Намінальная магутнасць | kW | 3.3 | — | |
| Вытворца | — | — | — | |
| акумулятар | мадэль | — | T125/3-EV-225 | — |
| Напруга | v | 24 | — | |
| Ёмістасць | Ah | 240 | — | |
| Вытворца | — | Траян / Ляўка | — | |
| Мадэлі шын | — | Бясследна і цвёрда /381×127 | — | |
V. Габарытная схема транспартнага сродку ў хадавым стане
Укладанне: дадатковыя канфігурацыі
(1) Сістэма папярэджання аб нагрузцы
(2) Працоўная лямпа платформы
(3) Падлучаны да паветравода рабочай платформы
(4) Падключана да сеткі пераменнага току рабочай платформы



